 今日はグラフとそれに関連するアルゴリズムについて話します。グラフは、プログラミングにおいて最も柔軟で多用途な構造の 1 つです。グラフ G は通常、セットのペア、つまり G = (V, R) によって定義されます。ここで、
今日はグラフとそれに関連するアルゴリズムについて話します。グラフは、プログラミングにおいて最も柔軟で多用途な構造の 1 つです。グラフ G は通常、セットのペア、つまり G = (V, R) によって定義されます。ここで、
- V は頂点のセットです。
- R は、頂点のペアを接続する線のセットです。
 有向線は円弧と呼ばれます。
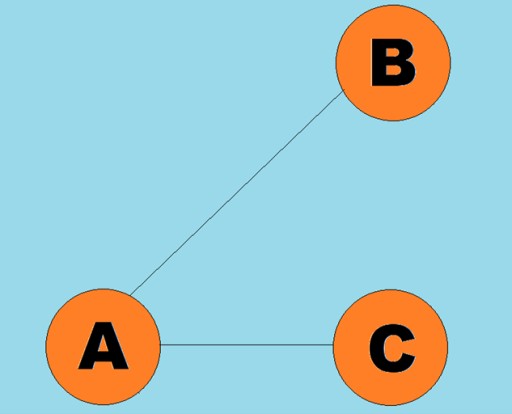
有向線は円弧と呼ばれます。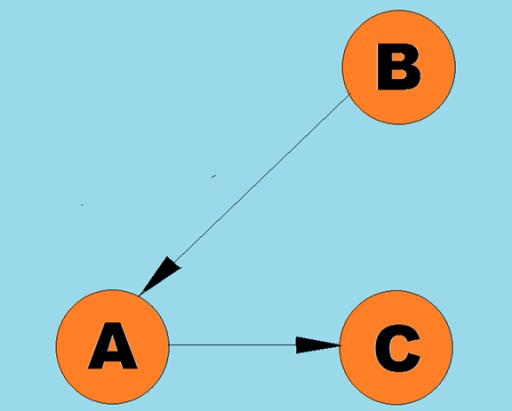 通常、グラフは、いくつかの頂点がエッジ (円弧) で接続されている図で表されます。エッジがトラバース方向を示すグラフは、有向グラフと呼ばれます。グラフがトラバースの方向を示さないエッジによって接続されている場合、それを無向グラフと言います。これは、頂点 A から頂点 B へ、および頂点 B から頂点 A への両方向への移動が可能であることを意味します。接続されたグラフとは、各頂点から他の頂点へ少なくとも 1 つのパスがつながっているグラフです (図のように)。上の例)。そうでない場合、グラフは切断されていると言われます。
通常、グラフは、いくつかの頂点がエッジ (円弧) で接続されている図で表されます。エッジがトラバース方向を示すグラフは、有向グラフと呼ばれます。グラフがトラバースの方向を示さないエッジによって接続されている場合、それを無向グラフと言います。これは、頂点 A から頂点 B へ、および頂点 B から頂点 A への両方向への移動が可能であることを意味します。接続されたグラフとは、各頂点から他の頂点へ少なくとも 1 つのパスがつながっているグラフです (図のように)。上の例)。そうでない場合、グラフは切断されていると言われます。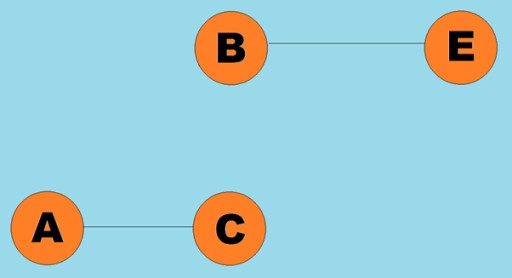 エッジ (円弧) に重みを割り当てることもできます。重みは、たとえば 2 つの頂点間の物理的距離 (または 2 つの頂点間の相対的な移動時間) を表す数値です。これらのグラフは重み付きグラフと呼ばれます。
エッジ (円弧) に重みを割り当てることもできます。重みは、たとえば 2 つの頂点間の物理的距離 (または 2 つの頂点間の相対的な移動時間) を表す数値です。これらのグラフは重み付きグラフと呼ばれます。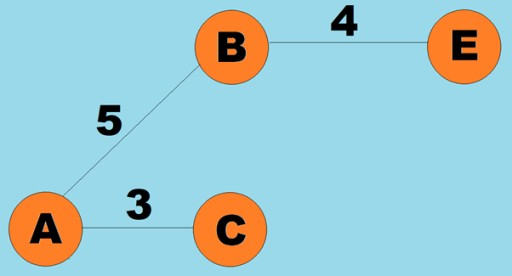
3. 経路探索アルゴリズム (深さ優先、幅優先)
グラフで実行される基本操作の 1 つは、特定の頂点から到達可能なすべての頂点を決定することです。ある都市から別の都市へのバスの乗車方法を、移動の可能性も含めて判断しようとしていると想像してください。直接アクセスできる都市もあれば、他の都市を経由しないとアクセスできない都市もあります。特定の頂点から到達できるすべての頂点を見つける必要がある状況は他にもたくさんあります。グラフを走査するには、深さ優先と幅優先の 2 つの主な方法があります。この両方について調べていきます。どちらの方法も、接続されているすべての頂点を横断します。深さ優先アルゴリズムと幅優先アルゴリズムをさらに詳しく調べるために、次のグラフを使用します。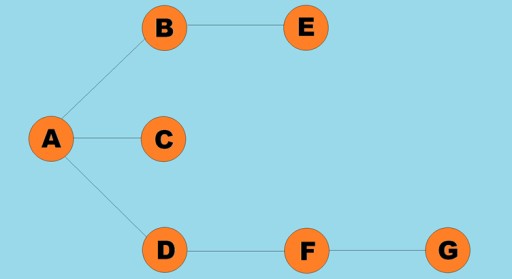
深さ優先検索
これは、最も一般的なグラフ走査方法の 1 つです。深さ優先戦略は、グラフ内をできるだけ深く調査することです。次に、行き止まりに到達した後、以前に訪問していない隣接する頂点のうち最も近い頂点に戻ります。このアルゴリズムは、行き止まりに達したときにどこに戻るかに関する情報をスタックに保存します。深さ優先検索のルール:- 以前に訪問されていない隣接する頂点を訪問し、訪問済みとしてマークし、スタックにプッシュします。
- この頂点に移動します。
- 手順 1 を繰り返します。
- ステップ 1 が不可能な場合は、前の頂点に戻ってステップ 1 の実行を試みます。それが不可能な場合は、その頂点より前の頂点に戻り、トラバースを続行できる頂点が見つかるまで同様に繰り返します。
- すべての頂点がスタック上に配置されるまで続けます。
 このアルゴリズムの Java コードがどのようになるかを見てみましょう。
このアルゴリズムの Java コードがどのようになるかを見てみましょう。
public class Graph {
private final int MAX_VERTS = 10;
private Vertex vertexArray[]; // Array of vertices
private int adjMat[][]; // Adjacency matrix
private int nVerts; // Current number of vertices
private Stack stack;
public Graph() { // Initialize internal fields
vertexArray = new Vertex[MAX_VERTS];
adjMat = new int[MAX_VERTS][MAX_VERTS];
nVerts = 0;
for (int j = 0; j < MAX_VERTS; j++) {
for (int k = 0; k < MAX_VERTS; k++) {
adjMat[j][k] = 0;
}
}
stack = new Stack<>();
}
public void addVertex(char lab) {
vertexArray[nVerts++] = new Vertex(lab);
}
public void addEdge(int start, int end) {
adjMat[start][end] = 1;
adjMat[end][start] = 1;
}
public void displayVertex(int v) {
System.out.println(vertexArray[v].getLabel());
}
public void dfs() { // Depth-first search
vertexArray[0].setVisited(true); // Take the first vertex
displayVertex(0);
stack.push(0);
while (!stack.empty()) {
int v = getAdjUnvisitedVertex(stack.peek()); // Return the index of the adjacent vertex: if any, 1; if not, -1
if (v == -1) { // If there is no unvisited adjacent vertex
stack.pop(); // The element is removed from the stack
}
else {
vertexArray[v].setVisited(true);
displayVertex(v);
stack.push(v); // The element goes on top of the stack
}
}
for (int j = 0; j < nVerts; j++) { // Reset the flags
vertexArray[j].visited = false;
}
}
private int getAdjUnvisitedVertex(int v) {
for (int j = 0; j < nVerts; j++) {
if (adjMat[v][j] == 1 && vertexArray[j].visited == false) {
return j; // Returns the first vertex found
}
}
return -1;
}
}public class Vertex {
private char label; // for example, 'A'
public boolean visited;
public Vertex(final char label) {
this.label = label;
visited = false;
}
public char getLabel() {
return this.label;
}
public boolean isVisited() {
return this.visited;
}
public void setVisited(final boolean visited) {
this.visited = visited;
}
}
public class Solution {
public static void main(String[] args) {
Graph graph = new Graph();
graph.addVertex('A'); //0
graph.addVertex('B'); //1
graph.addVertex('C'); //2
graph.addVertex('D'); //3
graph.addVertex('E'); //4
graph.addVertex('F'); //5
graph.addVertex('G'); //6
graph.addEdge(0,1);
graph.addEdge(0,2);
graph.addEdge(0,3);
graph.addEdge(1,4);
graph.addEdge(3,5);
graph.addEdge(5,6);
System.out.println("Visits: ");
graph.dfs();
}
}幅優先検索
深さ優先検索と同様、このアルゴリズムは最も単純かつ基本的なグラフ走査方法の 1 つです。要点は、現在の頂点があるということです。未訪問の隣接する頂点をすべてキューに入れ、次の要素 (キューの先頭に格納されている頂点) を選択します。これが現在の頂点になります… このアルゴリズムを段階に分けると、次のステップを確認できます。- 現在の頂点に隣接する次の未訪問の頂点を訪問し、事前に訪問済みとしてマークし、キューに追加します。
- ステップ #1 を実行できない場合は、キューから頂点を削除し、それを現在の頂点にします。
- ステップ #1 と #2 を実行できない場合、走査は終了です。すべての頂点が走査されています (接続されたグラフがある場合)。
 ここでのグラフ クラスは、検索メソッド自体とキューが内部スタックを置き換える点を除いて、深さ優先検索アルゴリズムに使用したものとほぼ同じです。
ここでのグラフ クラスは、検索メソッド自体とキューが内部スタックを置き換える点を除いて、深さ優先検索アルゴリズムに使用したものとほぼ同じです。
public class Graph {
private final int MAX_VERTS = 10;
private Vertex vertexList[]; // Array of vertices
private int adjMat[][]; // Adjacency matrix
private int nVerts; // Current number of vertices
private Queue queue;
public Graph() {
vertexList = new Vertex[MAX_VERTS];
adjMat = new int[MAX_VERTS][MAX_VERTS];
nVerts = 0;
for (int j = 0; j < MAX_VERTS; j++) {
for (int k = 0; k < MAX_VERTS; k++) { // Fill the adjacency matrix with zeros
adjMat[j][k] = 0;
}
}
queue = new PriorityQueue<>();
}
public void addVertex(char lab) {
vertexList[nVerts++] = new Vertex(lab);
}
public void addEdge(int start, int end) {
adjMat[start][end] = 1;
adjMat[end][start] = 1;
}
public void displayVertex(int v) {
System.out.println(vertexList[v].getLabel());
}
public void bfc() { // Depth-first search
vertexList[0].setVisited(true);
displayVertex(0);
queue.add(0);
int v2;
while (!queue.isEmpty()) {
int v = queue.remove();
while((v2 = getAdjUnvisitedVertex(v))!=-1) {// The loop runs until every adjacent vertex is found and added to the queue
vertexList[v2].visited = true;
displayVertex(v2);
queue.add(v2);
}
}
for (int j = 0; j < nVerts; j++) { // Reset the flags
vertexList[j].visited = false;
}
}
private int getAdjUnvisitedVertex(int v) {
for (int j = 0; j < nVerts; j++) {
if (adjMat[v][j] == 1 && vertexList[j].visited == false) {
return j; // Returns the first vertext found
}
}
return -1;
}
}public class Solution {
public static void main(String[] args) {
Graph graph = new Graph();
graph.addVertex('A'); //0
graph.addVertex('B'); //1
graph.addVertex('C'); //2
graph.addVertex('D'); //3
graph.addVertex('E'); //4
graph.addVertex('F'); //5
graph.addVertex('G'); //6
graph.addEdge(0,1);
graph.addEdge(0,2);
graph.addEdge(0,3);
graph.addEdge(1,4);
graph.addEdge(3,5);
graph.addEdge(5,6);
System.out.println("Visits: ");
graph.bfc();
}
}4. ダイクストラのアルゴリズム
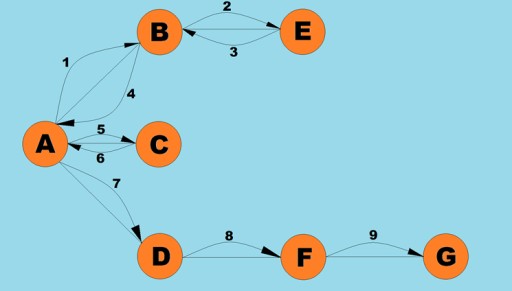
前述したように、グラフには有向性と無向性があります。そして、重み付けもできることを思い出してください。重み付き有向グラフは、実生活でよく見られる関係をモデル化します。たとえば、都市が頂点であり、その間のエッジが有向エッジの方向に流れる一方通行の道路である都市の地図です。あなたが運送会社で、遠く離れた 2 つの都市間の最短ルートを見つける必要があるとします。どうやってやりますか?2 つの頂点間の最短経路を見つけることは、重み付きグラフを使用して解決される最も一般的な問題の 1 つです。この問題を解決するために、ダイクストラのアルゴリズムを使用します。これを実行すると、特定の最初の頂点から他のすべての頂点までの最短パスがわかります。このアルゴリズムの手順は何ですか? この質問に答えてみます。ダイクストラのアルゴリズムのステップ:- ステップ 1: 移動先のコストが最も低い (エッジの重みが最も低い) 隣接ノードを見つけます。あなたはまさに先頭に立って、ノード A かノード B のどちらに行くべきかを考えています。これらの各ノードに移動するコストはいくらでしょうか?
- ステップ 2: В からエッジを横断するときに、アルゴリズムがまだ訪問していないすべてのノード В の隣接ノードまで移動する距離を計算します。新しい距離が古い距離より小さい場合、エッジ B を通るパスがこの頂点の新しい最短パスになります。
- ステップ 3: 頂点 B を訪問済みとしてマークします。
- ステップ 4: ステップ 1 に進みます。
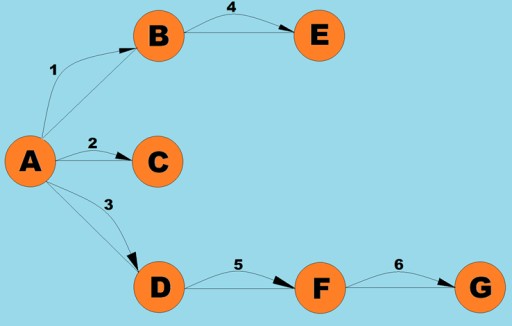
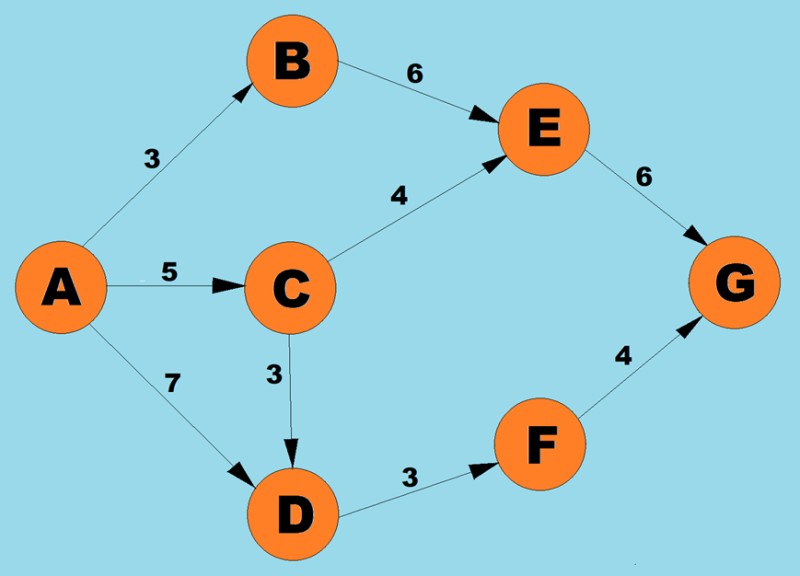 上記のアルゴリズムを使用して、A から G への最短経路を決定します。
上記のアルゴリズムを使用して、A から G への最短経路を決定します。
- 頂点 A には、重み 3 で B へ、重み 5 で С へ、重み 7 で D への 3 つのパスが考えられます。アルゴリズムの最初のステップに従って、コスト (エッジの重み) が最も低いノードを選択します。この場合、B.
-
B の唯一の未訪問の近傍は頂点 Е であるため、この頂点を通過した場合のパスがどのようになるかを確認します。3(AB) + 6(BE) = 9。
したがって、A から E への現在の最短パスは 9 であると記録します。
-
頂点 B での作業が完了したので、エッジの重みが最小になる次の頂点の選択に進みます。
頂点 A と B から、可能性は頂点 D (7)、C (5)、または E (6) です。
С へのエッジの重みが最も小さいため、この頂点に進みます。
-
次に、前と同様に、C を通過するときに隣接する頂点への最短パスを見つけます。
-
AD = 5 (AC) + 3 (CD) = 8 ですが、以前の最短パス (AC = 7) は С を通る今回の最短パスより小さいため、最短パス (AC = 7) を変更しません。
-
CE = 5(AC) + 4(CE) = 9。この新しい最短パスは前のパスと等しいため、これも変更しないままにします。
-
-
最も近いアクセス可能な頂点 (E および D) から、エッジの重みが最小の頂点、つまり D (3) を選択します。
-
隣接する F への最短経路を見つけます。
AF = 7(AD) + 3(DF) = 9
-
最も近いアクセス可能な頂点 (E および F) から、エッジの重みが最小の頂点、つまり F (3) を選択します。
-
隣接する G への最短経路を見つけます。
AG = 7(AD) + 3(DF) + 4(FG) = 14
つまり、A から G へのパスが見つかりました。
ただし、それが最短であることを確認するには、頂点 E に対しても手順を実行する必要があります。
-
頂点 G には有向エッジが指す隣接する頂点がないため、頂点 E だけが残っており、それを選択します。
-
隣接する G への最短経路を見つけます。
AG = 3 (AB) + 6 (BE) + 6 (EG) = 15。このパスは前の最短パス (AG (14)) より長いため、このパスを変更しないままにします。
G からつながる頂点がないため、この頂点でアルゴリズムのステップを実行することは意味がありません。これは、アルゴリズムの作業が完了したことを意味します。
public class Vertex {
private char label;
private boolean isInTree;
public Vertex(char label) {
this.label = label;
this.isInTree = false;
}
public char getLabel() {
return label;
}
public void setLabel(char label) {
this.label = label;
}
public boolean isInTree() {
return isInTree;
}
public void setInTree(boolean inTree) {
isInTree = inTree;
}
}public class Path { // A class that contains the distance and the previous and traversed vertices
private int distance; // Current distance from the starting vertex
private List parentVertices; // Current parent vertex
public Path(int distance) {
this.distance = distance;
this.parentVertices = new ArrayList<>();
}
public int getDistance() {
return distance;
}
public void setDistance(int distance) {
this.distance = distance;
}
public List getParentVertices() {
return parentVertices;
}
public void setParentVertices(List parentVertices) {
this.parentVertices = parentVertices;
}
}public class Graph {
private final int MAX_VERTS = 10;// Maximum number of vertices
private final int INFINITY = 100000000; // This number represents infinity
private Vertex vertexList[]; // List of vertices
private int relationMatrix[][]; // Matrix of edges between vertices
private int numberOfVertices; // Current number of vertices
private int numberOfVerticesInTree; // Number of visited vertices in the tree
private List shortestPaths; // List of shortest paths
private int currentVertex; // Current vertex
private int startToCurrent; // Distance to currentVertex
public Graph() {
vertexList = new Vertex[MAX_VERTS]; // Adjacency matrix
relationMatrix = new int[MAX_VERTS][MAX_VERTS];
numberOfVertices = 0;
numberOfVerticesInTree = 0;
for (int i = 0; i < MAX_VERTS; i++) { // Fill the adjacency matrix
for (int k = 0; k < MAX_VERTS; k++) { // with "infinity"
relationMatrix[i][k] = INFINITY; // Assign default values
shortestPaths = new ArrayList<>(); // Assign an empty list
}
}
}
public void addVertex(char lab) {// Assign new vertices
vertexList[numberOfVertices++] = new Vertex(lab);
}
public void addEdge(int start, int end, int weight) {
relationMatrix[start][end] = weight; // Set weighted edges between vertices
}
public void path() { // Choose the shortest path
// Set the initial vertex data
int startTree = 0; // Start from vertex 0
vertexList[startTree].setInTree(true); // Include the first element in the tree
numberOfVerticesInTree = 1;
// Fill out the shortest paths for vertices adjacent to the initial vertex
for (int i = 0; i < numberOfVertices; i++) {
int tempDist = relationMatrix[startTree][i];
Path path = new Path(tempDist);
path.getParentVertices().add(0);// The starting vertex will always be a parent vertex
shortestPaths.add(path);
}
// Until every vertex is in the tree
while (numberOfVerticesInTree < numberOfVertices) { // Do this until the number of of vertices in the tree equals the total number of vertices
int indexMin = getMin();// Get the index of the of the vertex with the smallest distance from the vertices not yet in the tree
int minDist = shortestPaths.get(indexMin).getDistance(); // Minimum distance to the vertices not yet in the tree
if (minDist == INFINITY) {
System.out.println("The graph has an unreachable vertex");
break; // If only unreachable vertices have not been visited, then we exit the loop
} else {
currentVertex = indexMin; // Set currentVert to the index of the current vertex
startToCurrent = shortestPaths.get(indexMin).getDistance(); // Set the distance to the current vertex
}
vertexList[currentVertex].setInTree(true); // Add the current vertex to the tree
numberOfVerticesInTree++; // Increase the count of vertices in the tree
updateShortestPaths(); // Update the list of shortest paths
}
displayPaths(); // Display the results on the console
}
public void clear() { // Clear the tree
numberOfVerticesInTree = 0;
for (int i = 0; i < numberOfVertices; i++) {
vertexList[i].setInTree(false);
}
}
private int getMin() {
int minDist = INFINITY; // The distance of the initial shortest path is taken to be infinite
int indexMin = 0;
for (int i = 1; i < numberOfVertices; i++) { // For each vertex
if (!vertexList[i].isInTree() && shortestPaths.get(i).getDistance() < minDist) { // If the vertex is not yet in the tree and the distance to the vertex is less than the current minimum
minDist = shortestPaths.get(i).getDistance(); // then update the minimum
indexMin = i; // Update the index of the vertex with the minimum distance
}
}
return indexMin; // Returns the index of the vertex with the smallest distance among those not yet in the tree
}
private void updateShortestPaths() {
int vertexIndex = 1; // The initial vertex is skipped
while (vertexIndex < numberOfVertices) { // Run over the columns
if (vertexList[vertexIndex].isInTree()) { // If the column vertex is already in the tree, then we skip it
vertexIndex++;
continue;
}
// Calculate the distance for one element sPath
// Get the edge from currentVert to column
int currentToFringe = relationMatrix[currentVertex][vertexIndex];
// Add up all the distances
int startToFringe = startToCurrent + currentToFringe;
// Determine the distance to the current vertexIndex
int shortPathDistance = shortestPaths.get(vertexIndex).getDistance();
// Compare the distance through currentVertex with the current distance in the vertex with index vertexIndex
if (startToFringe < shortPathDistance) { // If it is smaller, then the vertex at vertexIndex is assigned the new shortest path
List newParents = new ArrayList<>(shortestPaths.get(currentVertex).getParentVertices()); // Create a copy of the list of vertices of vertex currentVert's parents
newParents.add(currentVertex); // And add currentVertex to it as the previous vertex
shortestPaths.get(vertexIndex).setParentVertices(newParents); // Save the new path
shortestPaths.get(vertexIndex).setDistance(startToFringe); // Save the new distance
}
vertexIndex++;
}
}
private void displayPaths() { // A method for displaying the shortest paths on the screen
for (int i = 0; i < numberOfVertices; i++) {
System.out.print(vertexList[i].getLabel() + " = ");
if (shortestPaths.get(i).getDistance() == INFINITY) {
System.out.println("0");
} else {
String result = shortestPaths.get(i).getDistance() + " (";
List parents = shortestPaths.get(i).getParentVertices();
for (int j = 0; j < parents.size(); j++) {
result += vertexList[parents.get(j)].getLabel() + " -> ";
}
System.out.println(result + vertexList[i].getLabel() + ")");
}
}
}
}
public class Solution {
public static void main(String[] args) {
Graph graph = new Graph();
graph.addVertex('A');
graph.addVertex('B');
graph.addVertex('C');
graph.addVertex('D');
graph.addVertex('E');
graph.addVertex('F');
graph.addVertex('G');
graph.addEdge(0, 1, 3);
graph.addEdge(0, 2, 5);
graph.addEdge(0, 3, 7);
graph.addEdge(1, 4, 6);
graph.addEdge(2, 4, 4);
graph.addEdge(2, 3, 3);
graph.addEdge(3, 5, 3);
graph.addEdge(4, 6, 6);
graph.addEdge(5, 6, 4);
System.out.println("The following nodes form the shortest paths from node A:");
graph.path();
graph.clear();
}
}
GO TO FULL VERSION