 Różne algorytmy wyszukiwania są dostosowane do różnych zadań. Dzisiaj porozmawiamy o wyszukiwaniu A*, jednym z najskuteczniejszych algorytmów wyszukiwania ścieżek. Ten bardzo dobrze nadaje się do gier komputerowych i budowania wykresów wyszukiwania, takich jak drogi między miastami i tak dalej. Być może zauważyłeś na przykład w strategicznych lub taktycznych grach wideo, jak po naciśnięciu przycisku Twój gracz lub grupa natychmiast i bez opóźnień rozpoczyna przejście przez pole do określonego przez Ciebie punktu. Nie ma opóźnień właśnie dlatego, że gry wykorzystują skuteczne algorytmy, które dokładnie obliczają, w jaki sposób gracz musi się gdzieś dostać. Lub wróg, który bez wątpienia odnajdzie gracza i z daleka zacznie iść we właściwym kierunku. Zwykle do takich działań używany jest algorytm A*.
Różne algorytmy wyszukiwania są dostosowane do różnych zadań. Dzisiaj porozmawiamy o wyszukiwaniu A*, jednym z najskuteczniejszych algorytmów wyszukiwania ścieżek. Ten bardzo dobrze nadaje się do gier komputerowych i budowania wykresów wyszukiwania, takich jak drogi między miastami i tak dalej. Być może zauważyłeś na przykład w strategicznych lub taktycznych grach wideo, jak po naciśnięciu przycisku Twój gracz lub grupa natychmiast i bez opóźnień rozpoczyna przejście przez pole do określonego przez Ciebie punktu. Nie ma opóźnień właśnie dlatego, że gry wykorzystują skuteczne algorytmy, które dokładnie obliczają, w jaki sposób gracz musi się gdzieś dostać. Lub wróg, który bez wątpienia odnajdzie gracza i z daleka zacznie iść we właściwym kierunku. Zwykle do takich działań używany jest algorytm A*.
Co to jest algorytm A*
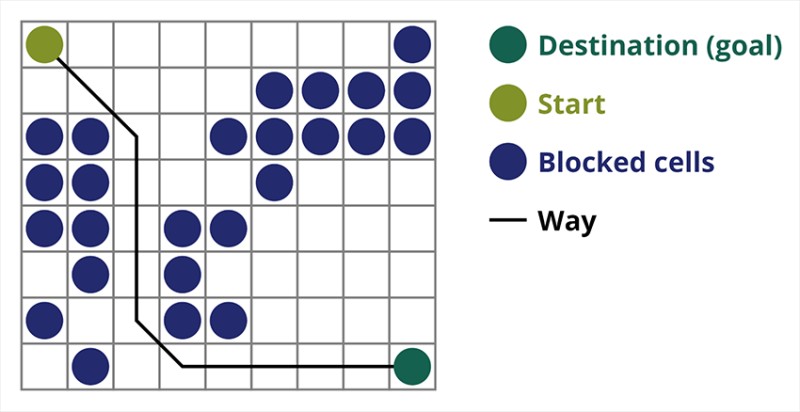
Algorytm wyszukiwania ścieżki A* jest przykładem algorytmu wyszukiwania w pierwszej kolejności. Celem algorytmu A* jest znalezienie ścieżki z jednego punktu do drugiego. Jest to jeden z klasyków wyszukiwania algorytmów grafowych. Zobaczmy, jak to działa, na przykładzie. Wyobraź sobie grę 2D z widokiem z góry. Podzielmy nasz obszar gry na kwadratowe chciwości, na przykład 8*8 komórek jak szachownica. Nasze cele mogą być jednego z dwóch typów, przejezdne lub nieprzejezdne (przeszkoda). Za każdym razem gracz lub wróg zbliżający się do gracza porusza się o jedną komórkę. W grach przejezdne komórki mogą mieć różny charakter, np. płaską drogę, trawę lub piasek, co decyduje o trudności poruszania się po nich, ale dla uproszczenia założymy, że wszystkie przejezdne komórki pokonuje się w ten sam sposób. Na poniższym obrazku niebieskie komórki to przeszkody.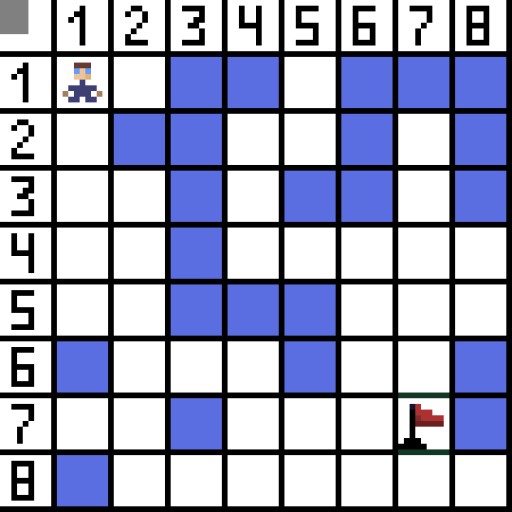 Przypiszmy jedną komórkę (lub węzeł) jako komórkę początkową (znajduje się w niej znak), a drugą komórkę jako komórkę docelową lub docelową (tą z flagą) i opiszmy, jak działa algorytm A* w tym przypadku. Znak znajduje się w komórce (1,1), a cel w komórce (7,7). Każda komórka ma sąsiadów poziomych, pionowych i ukośnych. To zależy od gry, czy policzymy węzły ukośne, czy nie. Na przykład w wielu grach z widokiem z góry, takich jak Bomberman czy Pacman, postacie mogą poruszać się tylko w poziomie lub w pionie. W tym przypadku każdy węzeł, z wyjątkiem stykania się z krawędziami, ma tylko 4 sąsiadów. Jeśli mówimy o grze, w której postacie mogą poruszać się po przekątnej, każdy węzeł może mieć maksymalnie 8 sąsiadów. W pierwszym kroku algorytmu komórka, w której znajduje się znak, ma dwóch sąsiadów. A dokładniej trzy, ale jedna z nich stanowi przeszkodę.
Przypiszmy jedną komórkę (lub węzeł) jako komórkę początkową (znajduje się w niej znak), a drugą komórkę jako komórkę docelową lub docelową (tą z flagą) i opiszmy, jak działa algorytm A* w tym przypadku. Znak znajduje się w komórce (1,1), a cel w komórce (7,7). Każda komórka ma sąsiadów poziomych, pionowych i ukośnych. To zależy od gry, czy policzymy węzły ukośne, czy nie. Na przykład w wielu grach z widokiem z góry, takich jak Bomberman czy Pacman, postacie mogą poruszać się tylko w poziomie lub w pionie. W tym przypadku każdy węzeł, z wyjątkiem stykania się z krawędziami, ma tylko 4 sąsiadów. Jeśli mówimy o grze, w której postacie mogą poruszać się po przekątnej, każdy węzeł może mieć maksymalnie 8 sąsiadów. W pierwszym kroku algorytmu komórka, w której znajduje się znak, ma dwóch sąsiadów. A dokładniej trzy, ale jedna z nich stanowi przeszkodę. 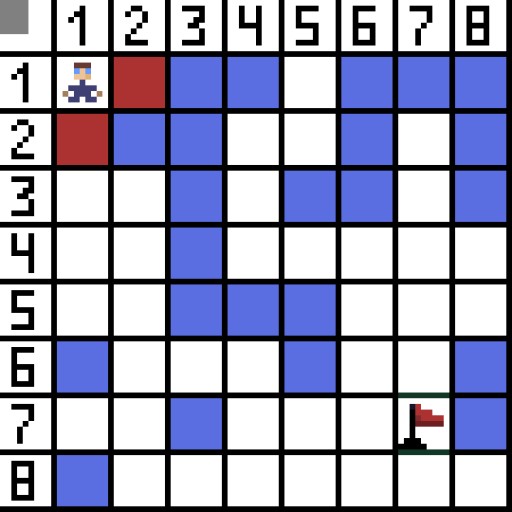 Oczywiste jest, że droga ukośna jest dłuższa. jeśli ustawimy bok naszej komórki na warunkowo równy jeden, wówczas długość przekątnej tej komórki będzie równa pierwiastkowi kwadratowemu z dwóch. Tak mówi twierdzenie Pitagorasa. Aby przejść z komórki A do komórki B, należy najpierw wybrać jedną z sąsiednich komórek, a następnie następną i tak dalej. Po drodze zrozum także, czy możliwe jest przedostanie się z komórki początkowej do docelowej. Algorytm A* na każdym kroku wybiera jedną z sąsiednich komórek zgodnie z wartością funkcji F. Funkcja ta mierzy, jak dobrze komórka kandydująca ma zostać uwzględniona na naszej najkrótszej ścieżce. Jest to funkcja kosztu będąca sumą funkcji ruchu G i funkcji heurystycznej.
Oczywiste jest, że droga ukośna jest dłuższa. jeśli ustawimy bok naszej komórki na warunkowo równy jeden, wówczas długość przekątnej tej komórki będzie równa pierwiastkowi kwadratowemu z dwóch. Tak mówi twierdzenie Pitagorasa. Aby przejść z komórki A do komórki B, należy najpierw wybrać jedną z sąsiednich komórek, a następnie następną i tak dalej. Po drodze zrozum także, czy możliwe jest przedostanie się z komórki początkowej do docelowej. Algorytm A* na każdym kroku wybiera jedną z sąsiednich komórek zgodnie z wartością funkcji F. Funkcja ta mierzy, jak dobrze komórka kandydująca ma zostać uwzględniona na naszej najkrótszej ścieżce. Jest to funkcja kosztu będąca sumą funkcji ruchu G i funkcji heurystycznej.
-
Koszt G — to odległość od węzła początkowego.
-
Koszt H (heurystyczny) to odległość od węzła końcowego (celu). Ta funkcja może być inna, programista decyduje, co jest lepsze. Być może wybór H jest najważniejszy w A* i to właśnie ten punkt sprawia, że każda konkretna implementacja algorytmu jest mniej lub bardziej skuteczna. Teoretycznie możesz użyć dowolnej funkcji.
W naszym przypadku znamy położenie komórki docelowej i możemy na przykład obliczyć geometryczną odległość euklidesową pomiędzy celem a aktualną komórką. Im krótszy dystans, tym bliżej jesteśmy celu.
-
Koszt F = G + H. Zatem algorytm oblicza koszty F wszystkich sąsiadujących węzłów i wybiera jeden z najniższych kosztów F, który będzie rozpatrywany w pierwszej kolejności. Kiedy już wybierzemy któryś z nich, oznaczamy go jako zamknięty i obliczamy wartości dla sąsiadów tego węzła.

Funkcja heurystycznaJak obliczyć H?
Jest to funkcja heurystyczna. Już sama nazwa oznacza, że jest ona zdeterminowana doświadczeniem i może być różna. Tutaj przyjmiemy to jako równe tzw. odległości euklidesowej między punktami (x1, y1) i (x2, y2):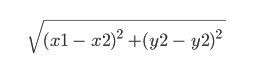
 Na zdjęciu w pierwszym kroku są dwie opcje i są one takie same pod względem kosztów, ale w następnym kroku postać wpada w ślepy zaułek w jednej z opcji. Dlatego idziemy w drugą stronę. W następnej iteracji mamy już 4 opcje.
Na zdjęciu w pierwszym kroku są dwie opcje i są one takie same pod względem kosztów, ale w następnym kroku postać wpada w ślepy zaułek w jednej z opcji. Dlatego idziemy w drugą stronę. W następnej iteracji mamy już 4 opcje. 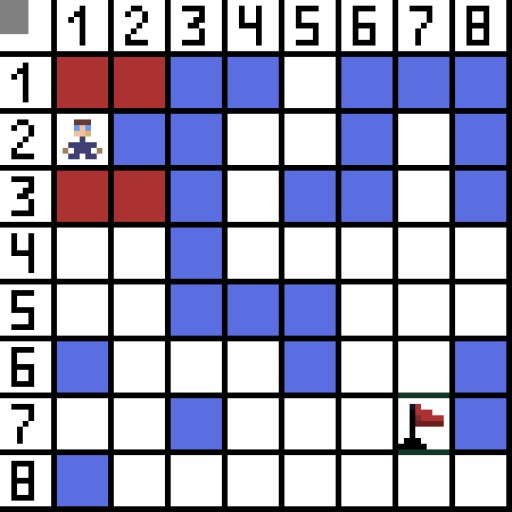 Dwie z nich nie nadają się, bo prowadzą do tyłu, a pozostałe opcje są równie dobre, ale algorytm zdecydował, że najlepiej będzie iść po przekątnej do komórki (3,2). Ponadto na każdym etapie obliczenia funkcji F są powtarzane, aż znak dotrze do komórki docelowej. Jeśli oczywiście taki fragment istnieje.
Dwie z nich nie nadają się, bo prowadzą do tyłu, a pozostałe opcje są równie dobre, ale algorytm zdecydował, że najlepiej będzie iść po przekątnej do komórki (3,2). Ponadto na każdym etapie obliczenia funkcji F są powtarzane, aż znak dotrze do komórki docelowej. Jeśli oczywiście taki fragment istnieje.  Zielona droga na obrazku gif wskazuje optymalną ścieżkę postaci do flagi.
Zielona droga na obrazku gif wskazuje optymalną ścieżkę postaci do flagi.
A* Algorytm krok po kroku
Aby zaimplementować algorytm w Javie, należy wykonać następujące kroki: 1. Najpierw należy utworzyć dwie listy, dla węzłów otwartych i węzłów zamkniętych. 2. Zainicjuj obie listy. Na liście zamkniętej węzeł początkowy wskazuje listę otwartą. 3. gdy na liście otwartej znajdują się elementy: 3a. Znajdź węzeł min z najmniejszym F 3b. Usuń min z otwartej listy 3c. Określ sąsiadów min (do 8, jeśli uwzględnić przekątne) 3d. Sprawdzanie każdego sąsiada: a) jeśli sąsiadem jest komórka docelowa, przestań szukać b) Jeśli nie, oblicz dla niego G, H. G = min.G + odległość między sąsiadem a min F = G + H c) jeśli węzeł o tej samej pozycji co sąsiad znajduje się na liście otwartej, a jego F jest mniejsze niż sąsiada, pomiń tego sąsiada d) jeśli węzeł o tej samej pozycji co sąsiad znajduje się na liście zamkniętej, a jego f jest mniejsze niż w przypadku sąsiada, pomiń tego sąsiada. W przeciwnym razie dodaj węzeł do otwartej listy. Koniec pętli wewnętrznej 3e. Dodanie min do zamkniętej listy Koniec pętli zewnętrznej Zatem przy każdej iteracji będziemy robić następną:- Wybierz komórkę z naszej otwartej listy z najniższym szacunkowym wynikiem całkowitym.
- Usuń tę komórkę z otwartej listy.
- Dodaj do otwartej listy wszystkie komórki, do których możemy z niego dotrzeć.
- Kiedy to robimy, przetwarzamy również nowy wynik z tego węzła do każdego nowego, aby sprawdzić, czy jest to poprawa w stosunku do tego, co mamy do tej pory, a jeśli tak, aktualizujemy wszystko, co wiemy o tej komórce.
A* Pseudokod
Oto krótki pseudokod wyszukiwania ścieżki A*:Input: a grid with locked and empty cells, with start and goal cell.
Output: least cost path from start to goal cell.
Initialisation
openList = {startCell} //list of traversed cells
closedList = {} //list of already traversed cells
g.startCell = 0 //cost from source cell to a cell
h.startCell = h(startCell, goal) //heuristic
f.startCell = g.startCell + h.StartCell
while openList is not empty
do
//let the currentCell equal the cell with the least f value
currentCell = Cell on top of openList, with least f
if currentCell == end return
remove currentCell from openList
add currentCell to closedList
foreach n in child.currentCell
if n in closedList
continue
cost = g.currentCell + distance(currentCell,n)
if (n in openList and cost < g.n)
remove n from closedList
g.n = cost
h.n = h(n, goal)
f.n = g.n + h.nOd pseudokodu do implementacji A* w Javie
A* Pathfinding w realizacji Java powinien mieć pewne metody obsługujące algorytm:- Komórka, struktura przechowująca niezbędne parametry
- Listy otwarte i zamknięte
- Metoda obliczania funkcji heurystycznej
- Metoda śledzenia ścieżki od źródła do miejsca docelowego
- Metody sprawdzające, czy dana komórka jest zablokowana, czy została już osiągnięta, czy jest ważna i tak dalej
package Asterist;
import java.util.PriorityQueue;
import java.util.Stack;
public class AAsterisk {
//Java Program to implement A* Search Algorithm
//Here we're creating a shortcut for (int, int) pair
public static class Pair {
int first;
int second;
public Pair(int first, int second){
this.first = first;
this.second = second;
}
@Override
public boolean equals(Object obj) {
return obj instanceof Pair && this.first == ((Pair)obj).first && this.second == ((Pair)obj).second;
}
}
// Creating a shortcut for tuple<int, int, int> type
public static class Details {
double value;
int i;
int j;
public Details(double value, int i, int j) {
this.value = value;
this.i = i;
this.j = j;
}
}
// a Cell (node) structure
public static class Cell {
public Pair parent;
// f = g + h, where h is heuristic
public double f, g, h;
Cell()
{
parent = new Pair(-1, -1);
f = -1;
g = -1;
h = -1;
}
public Cell(Pair parent, double f, double g, double h) {
this.parent = parent;
this.f = f;
this.g = g;
this.h = h;
}
}
// method to check if our cell (row, col) is valid
boolean isValid(int[][] grid, int rows, int cols,
Pair point)
{
if (rows > 0 && cols > 0)
return (point.first >= 0) && (point.first < rows)
&& (point.second >= 0)
&& (point.second < cols);
return false;
}
//is the cell blocked?
boolean isUnBlocked(int[][] grid, int rows, int cols,
Pair point)
{
return isValid(grid, rows, cols, point)
&& grid[point.first][point.second] == 1;
}
//Method to check if destination cell has been already reached
boolean isDestination(Pair position, Pair dest)
{
return position == dest || position.equals(dest);
}
// Method to calculate heuristic function
double calculateHValue(Pair src, Pair dest)
{
return Math.sqrt(Math.pow((src.first - dest.first), 2.0) + Math.pow((src.second - dest.second), 2.0));
}
// Method for tracking the path from source to destination
void tracePath(
Cell[][] cellDetails,
int cols,
int rows,
Pair dest)
{ //A* Search algorithm path
System.out.println("The Path: ");
Stack<Pair> path = new Stack<>();
int row = dest.first;
int col = dest.second;
Pair nextNode = cellDetails[row][col].parent;
do {
path.push(new Pair(row, col));
nextNode = cellDetails[row][col].parent;
row = nextNode.first;
col = nextNode.second;
} while (cellDetails[row][col].parent != nextNode); // until src
while (!path.empty()) {
Pair p = path.peek();
path.pop();
System.out.println("-> (" + p.first + "," + p.second + ") ");
}
}
// A main method, A* Search algorithm to find the shortest path
void aStarSearch(int[][] grid,
int rows,
int cols,
Pair src,
Pair dest)
{
if (!isValid(grid, rows, cols, src)) {
System.out.println("Source is invalid...");
return;
}
if (!isValid(grid, rows, cols, dest)) {
System.out.println("Destination is invalid...");
return;
}
if (!isUnBlocked(grid, rows, cols, src)
|| !isUnBlocked(grid, rows, cols, dest)) {
System.out.println("Source or destination is blocked...");
return;
}
if (isDestination(src, dest)) {
System.out.println("We're already (t)here...");
return;
}
boolean[][] closedList = new boolean[rows][cols];//our closed list
Cell[][] cellDetails = new Cell[rows][cols];
int i, j;
// Initialising of the starting cell
i = src.first;
j = src.second;
cellDetails[i][j] = new Cell();
cellDetails[i][j].f = 0.0;
cellDetails[i][j].g = 0.0;
cellDetails[i][j].h = 0.0;
cellDetails[i][j].parent = new Pair( i, j );
// Creating an open list
PriorityQueue<Details> openList = new PriorityQueue<>((o1, o2) -> (int) Math.round(o1.value - o2.value));
// Put the starting cell on the open list, set f.startCell = 0
openList.add(new Details(0.0, i, j));
while (!openList.isEmpty()) {
Details p = openList.peek();
// Add to the closed list
i = p.i; // second element of tuple
j = p.j; // third element of tuple
// Remove from the open list
openList.poll();
closedList[i][j] = true;
// Generating all the 8 neighbors of the cell
for (int addX = -1; addX <= 1; addX++) {
for (int addY = -1; addY <= 1; addY++) {
Pair neighbour = new Pair(i + addX, j + addY);
if (isValid(grid, rows, cols, neighbour)) {
if(cellDetails[neighbour.first] == null){ cellDetails[neighbour.first] = new Cell[cols]; }
if (cellDetails[neighbour.first][neighbour.second] == null) {
cellDetails[neighbour.first][neighbour.second] = new Cell();
}
if (isDestination(neighbour, dest)) {
cellDetails[neighbour.first][neighbour.second].parent = new Pair ( i, j );
System.out.println("The destination cell is found");
tracePath(cellDetails, rows, cols, dest);
return;
}
else if (!closedList[neighbour.first][neighbour.second]
&& isUnBlocked(grid, rows, cols, neighbour)) {
double gNew, hNew, fNew;
gNew = cellDetails[i][j].g + 1.0;
hNew = calculateHValue(neighbour, dest);
fNew = gNew + hNew;
if (cellDetails[neighbour.first][neighbour.second].f == -1
|| cellDetails[neighbour.first][neighbour.second].f > fNew) {
openList.add(new Details(fNew, neighbour.first, neighbour.second));
// Update the details of this
// cell
cellDetails[neighbour.first][neighbour.second].g = gNew;
//heuristic function cellDetails[neighbour.first][neighbour.second].h = hNew;
cellDetails[neighbour.first][neighbour.second].f = fNew;
cellDetails[neighbour.first][neighbour.second].parent = new Pair( i, j );
}
}
}
}
}
}
System.out.println("Failed to find the Destination Cell");
}
// test
public static void main(String[] args) {
//0: The cell is blocked
// 1: The cell is not blocked
int[][] grid = {
{ 1, 1, 0, 0, 1, 0, 0, 0 },
{ 1, 0, 0, 1, 1, 0, 1, 0 },
{ 1, 1, 0, 1, 0, 0, 1, 0 },
{ 1, 1, 0, 1, 1, 1, 1, 1 },
{ 1, 1, 0, 0, 0, 1, 1, 1 },
{ 0, 1, 1, 1, 0, 1, 1, 0 },
{ 1, 1, 0, 1, 1, 1, 1, 0 },
{ 0, 1, 1, 1, 1, 1, 1, 1 }
};
// Start is the left-most upper-most corner
Pair src = new Pair(0,0);
//(8, 0);
// Destination is the right-most bottom-most corner
Pair dest = new Pair(6, 6);
AAsterisk app = new AAsterisk();
app.aStarSearch(grid, grid.length , grid[0].length, src, dest);
}
}
GO TO FULL VERSION